Publications
2024
-
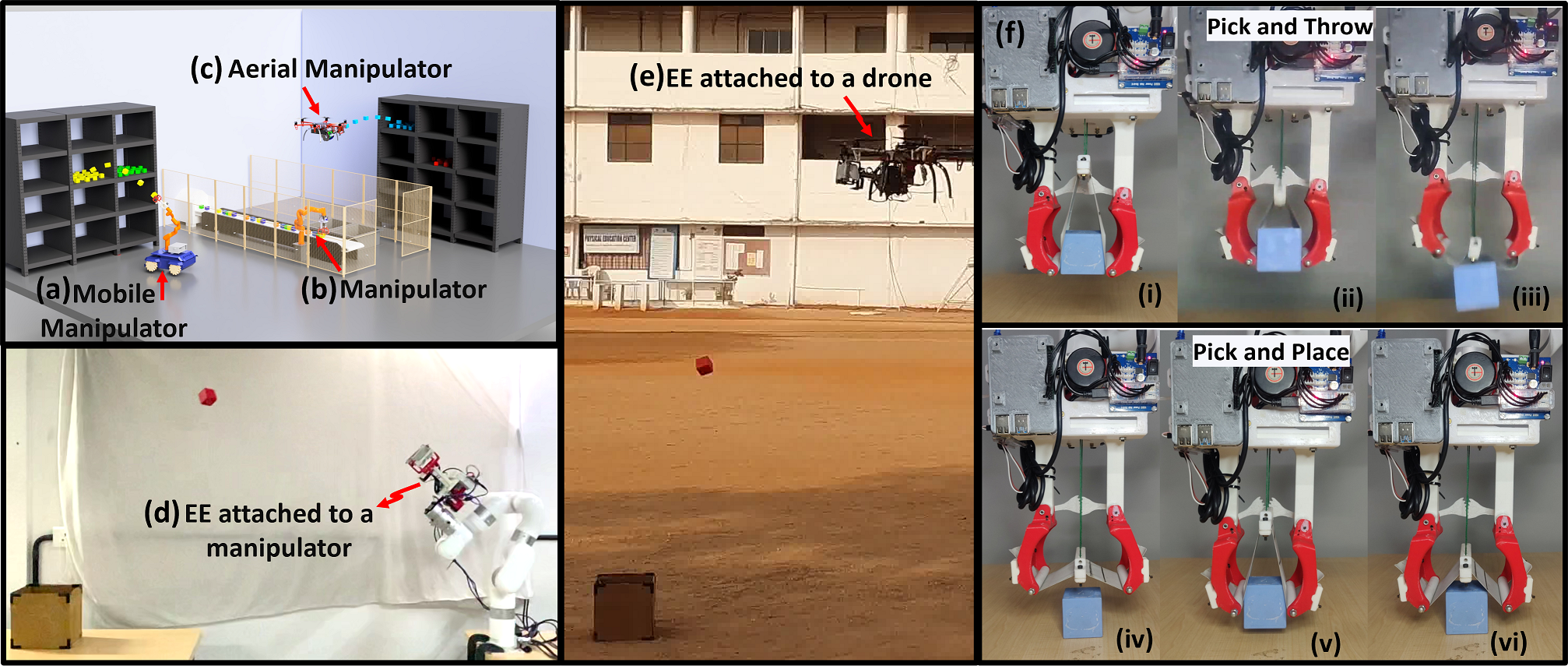 Identification and Learning-Based Control of an End-Effector for Targeted ThrowingHaasith Venkata Sai Pasala, Nagamanikandan Govindan, and Samarth BrahmbhattIEEE Robotics and Automation Letters, 2024
Identification and Learning-Based Control of an End-Effector for Targeted ThrowingHaasith Venkata Sai Pasala, Nagamanikandan Govindan, and Samarth BrahmbhattIEEE Robotics and Automation Letters, 2024Drones and mobile manipulators that can throw objects in addition to picking and placing them can be highly useful in industrial automation, warehouse environments, search and rescue operations, and sports training. However, predominant end-effectors primarily cater to grasping functions, neglecting the throwing aspect. Currently, throwing is achieved by fast whole-arm motion (Zeng et al., 2020), an approach that raises concerns regarding safety and energy efficiency. Additionally, targeted throwing poses several challenges due to the uncertainties in model parameters and unmodelled dynamics. This letter presents a new end-effector mechanism that can grasp and then place or throw an object using stored elastic energy. The instantaneous release of this stored energy propels the grasped object into projectile motion, facilitating its placement in a desired target location which can lie beyond the reachable workspace of the robot arm. We describe the mechanical design of the end-effector, its simulation model, a system identification method to fit model parameters, and a data-driven residual learning framework. The residual model predicts control input residuals arising from model uncertainties, improving targeted throwing accuracy even with unseen objects. Experiments conducted with our robot arm mounted end-effector show the efficacy of our end-effector mechanism and associated algorithms for targeted throwing.
@article{10681644, author = {Pasala, Haasith Venkata Sai and Govindan, Nagamanikandan and Brahmbhatt, Samarth}, journal = {IEEE Robotics and Automation Letters}, title = {Identification and Learning-Based Control of an End-Effector for Targeted Throwing}, year = {2024}, volume = {9}, number = {11}, pages = {9558-9564}, keywords = {End effectors;Motors;Grasping;Gears;Solid modeling;Service robots;Grippers;End effectors;Modeling;Mechanism design;System identification;Grippers and other end-effectors;throwing manipulation;model learning for control;mechanism design;and system identification}, doi = {10.1109/LRA.2024.3462250}, url = {https://ieeexplore.ieee.org/document/10681644}, video = {https://www.youtube.com/watch?v=U9QqPYyQqn8} }

2023
-
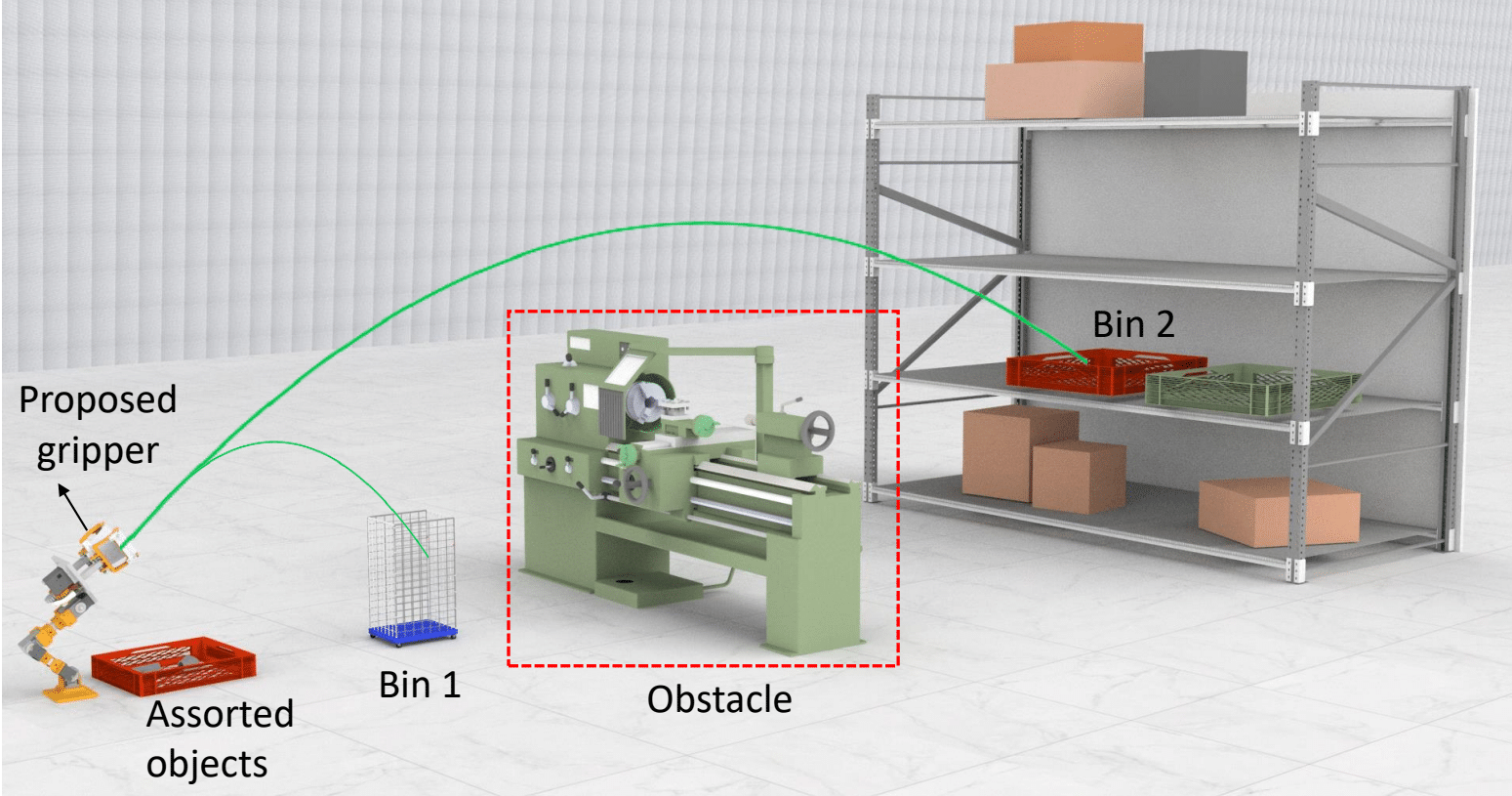 A Novel Hybrid Gripper Capable of Grasping and Throwing ManipulationNagamanikandan Govindan, Bharadhwaj Ramachandran, Pasala Haasith Venkata Sai, and 1 more authorIEEE/ASME Transactions on Mechatronics, 2023
A Novel Hybrid Gripper Capable of Grasping and Throwing ManipulationNagamanikandan Govindan, Bharadhwaj Ramachandran, Pasala Haasith Venkata Sai, and 1 more authorIEEE/ASME Transactions on Mechatronics, 2023Throwing motion is known for phenomenally fast rearrangement, sorting tasks, and placing the object outside the limited workspace with less effort. However, in the robotics domain, despite many simple yet versatile, mechanically intelligent grippers reported earlier, they focus primarily on achieving robust grasping and dexterous manipulation. This article presents a novel design of a single actuator driven hybrid gripper with mechanically coupled rigid links and elastic gripping surface; this arrangement provides the dual function of versatile grasping and throwing manipulation. The gripper comprises a latching mechanism (LM) that drives two passive rigid fingers by elongating/releasing the coupled elastic strip. Elongating the gripping surface enables the gripper to adapt to objects with different geometries, vary surface contact force characteristics, and store the energy in the form of elastic potential. A mechanism to discharge the stored potential energy gradually or instantaneously is essential when the intended task is to place the object free from impact or away from the limited reachable workspace. The proposed LM can swiftly shift from a quick release to a gradual release of the stored elastic potential for greater object’s acceleration during throwing and no acceleration while placing. By doing so, the object can be placed at the desired location even farther than the manipulator’s reachable workspace. We report the proposed gripper’s design details, development, and experimentally demonstrate the versatile grasping, impact-free placing, and throwing capabilities.
@article{10107527, author = {Govindan, Nagamanikandan and Ramachandran, Bharadhwaj and Sai, Pasala Haasith Venkata and Krishna, K. Madhava}, journal = {IEEE/ASME Transactions on Mechatronics}, title = {A Novel Hybrid Gripper Capable of Grasping and Throwing Manipulation}, year = {2023}, pages = {1-12}, doi = {10.1109/TMECH.2023.3264287}, video = {https://www.youtube.com/watch?v=1REb7JnupX8} }
